Linear Subspace Design for Real-Time Shape Deformation
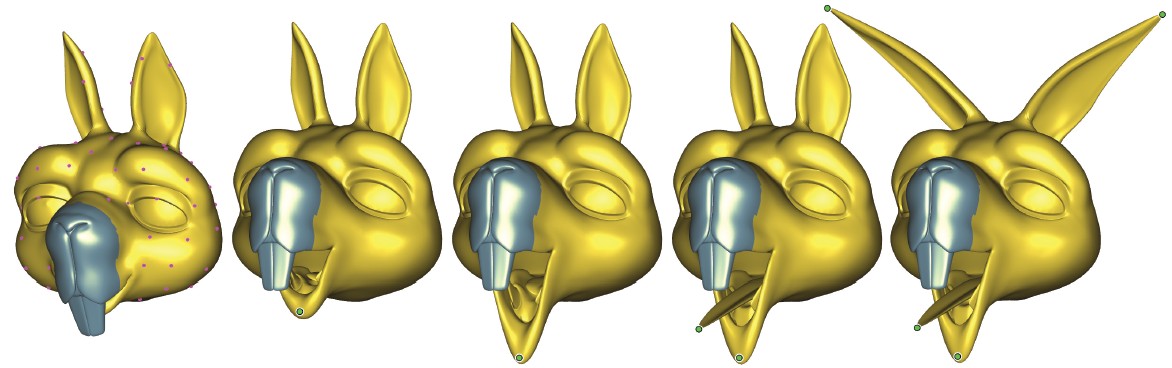 |
AbstractWe propose a method to design linear deformation subspaces, unifying linear blend skinning and generalized barycentric coordinates. Deformation subspaces cut down the time complexity of variational shape deformation methods and physics-based animation (reduced-order physics). Our subspaces feature many desirable properties: interpolation, smoothness, shape-awareness, locality, and both constant and linear precision. We achieve these by minimizing a quadratic deformation energy, built via a discrete Laplacian inducing linear precision on the domain boundary. Our main advantage is speed: subspace bases are solutions to a sparse linear system, computed interactively even for generously tessellated domains. Users may seamlessly switch between applying transformations at handles and editing the subspace by adding, removing or relocating control handles. The combination of fast computation and good properties means that designing the right subspace is now just as creative as manipulating handles. This paradigm shift in handle-based deformation opens new opportunities to explore the space of shape deformations. PublicationYu Wang, Alec Jacobson, Jernej Barbic, Ladislav Kavan. Linear Subspace Design for Real-Time Shape Deformation. ACM Transaction on Graphics 34(4) [Proceedings of SIGGRAPH], 2015. Links and DownloadsAcknowledgementsWe would like to thank Keenan Crane, Mathieu Desbrun, Yotam Gingold, Eitan Grinspun, Maks Ovsjanikov, Eftychios Sifakis, Olga Sorkine-Hornung, Lifeng Zhu, and Denis Zorin for illuminating discussions. Harmony Li narrated the accompanying video. This research was sponsored by the National Science Foundation (IIS-1350330, CAREER-1055035, IIS-1422869) and the Sloan Foundation. The Columbia Computer Graphics Group is supported by the NSF, Intel, The Walt Disney Company, and Autodesk. |