The McGill/MIT Direct Drive Motor Project
The aim of this project has been to solve three problems with direct
drive arms: the large size and weight of these motors relative to
their mass, the propensity to overheat, and innacurate torque
production. Specific goals are to design a motor from scratch with:
- torque to mass ratio of 10 N.m/kg, and
- a torque accuracy of 1% full scale.
These specifications are several times greater than for
existing commercial designs. The design is a wound-field synchronous
motor in a pancake geometry with water cooling. A table-based
microprocessor controller utilizes calibration information to shape
the current waveforms to achieve the required torque accuracy.
This project was originally begun as a collaboration with Jeff Lang
and Steve Umans (responsible for the electromagnetic design) and Inaki
Garabieta and Erik Vaaler (responsible for mechanical design) from MIT
and Ian Hunter from McGill (Hollerbach, Lang, Vaaler, Garabieta, Sepe,
Umans, and Hunter, 1993). Through a series of 3 prototypes, the
performance goals of the motor were validated; three students (Ray
Sepe, Art Kalb, and Deron Jackson) completed their S.M. theses in
contributing to this project.
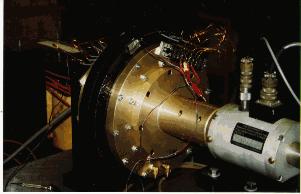
A commercial prototype of the motor was produced by MPB
Technologies (Pointe Claire, Quebec), under the PRECARN TDS
(Telerobotic Development Systems) project. Significant improvements
have been made in the underlying design. Farhad Aghili, a former
Ph.D. student, has contributed substantially to the detailed joint
design and dynamometer design. A complete joint structure, with dual
armatures for balanced axial loading and integral water cooling,
was completed.
Control strategies for this motor are described by the following
publications:
-
Aghili, F., Buehler, M., and Hollerbach, J.M., ``Motion control
systems with H-infinity positive joint torque feedback,'' IEEE
Trans. Control Systems Technology, 9 no. 5, 2001, pp. 685-694.
Earlier versions:
Aghili, F., Buehler, M., and Hollerbach, J.M., `` Disturbance attenuation and load decoupling
with H-infinity positive joint torque feedback,'' Proc. IEEE
Intl. Conf. Robotics & Automation, Leuven, Belgium, May 16-21,
1998, pp.3613-3618.
Aghili, F., Buehler, M., and Hollerbach, J.M., `` Dynamics and control of direct-drive robots with
positive joint torque feedback,'' Proc. IEEE
Intl. Conf. Robotics and Automation, Albuquerque, April 20-25,
1997, pp. 1156-1161.
-
Aghili, F., Buehler, M., and Hollerbach, J.M., ``Optimal commutation
laws in the frequency domain for synchronous direct-drive motors,''
IEEE Trans. Power Electronics, 15 no. 6, 2000, pp. 1056-1064.
Earlier version:
Aghili, F.,, Buehler, M.,, and Hollerbach, J.M., "Optimal commutation laws for torque control of
synchronous motors," Proc. American Control Conference,
Albuquerque, NM, June 1997, pp. 1968-1973.
-
Aghili, F., Buehler, M., and Hollerbach, J.M., ``Sensing the torque in
a robot's joints,'' Mechanical Engineering, 120, no. 9, 1998,
pp. 66-69.
Earlier version:
Aghili, F., Buehler, M., and Hollerbach, J.M., ``A new joint torque sensor for robots,''
Proc. ASME Int. Mech. Eng. Congress and Exhibition, IMECE`97,
Dallas, Texas, Nov. 16-19, 1997, paper number 97-WA/DE-7.
-
Aghili, F., Buehler, M., and Hollerbach, J.M., ``
Torque ripple minimization in direct-drive systems,'' Proc. IEEE/RSJ
Intl. Conf. Intelligent Robots and Systems (IROS'98), Victoria,
British Columbia, October 12-16, 1998.
- Aghili, F., Buehler, M., and Hollerbach, J.M., ``Model matching solution for optimal positive joint
torque feedback,'' Proc. IEEE/RSJ Int. Conf. Intelligent
Robots and Systems, IROS`97,} Grenoble, France, Sept 1997.
- Aghili, F., Buehler, M., and Hollerbach, J.M., ``A new indirect adaptive control strategy for a
synchronous direct drive motor,'' Proc. IEEE
Intl. Conf. Robotics and Automation, Minneapolis, April 22-28,
1996, pp. 2865-2870.
-
Hollerbach, J.M., Lang, J., Vaaler, E., Garabieta, I., Sepe, R.,
Umans, S., and Hunter, I.W., ``
The McGill/MIT Direct Drive Motor project,''
Proc. IEEE Intl. Conf. Robotics and Automation, May 2-7, 1993,
Atlanta, pp. 2:611-617.