Visualization of DH Parameters and Position Errors
for Serial Linkages
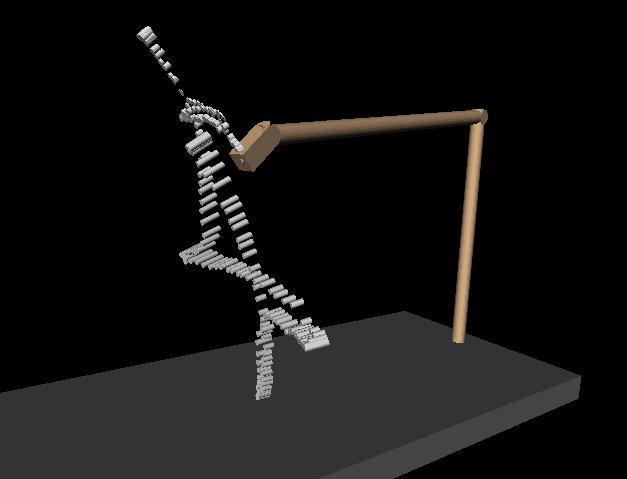
The Sarcos Treadport VR System. A five DOF device with
4 rotary joints and 1 prismatic joint. Position errors resulting from
closed-loop calibration using line constraint, shown for set of
initial estimates of DH parameters.
DHView homepage